Image
Defensie kampt met een tekort aan chauffeurs in bepaalde delen van de logistieke keten. De innovaties op het gebied van truck platooning in de civiele markt kunnen hier een antwoord op bieden. Bij truck platooning zijn vrachtwagens in een konvooi elektronisch aan elkaar gekoppeld, waarbij de voorste truck de snelheid en route bepaalt en de overige trucks automatisch volgen met een vaste volgafstand. Er wordt al civiel onderzoek gedaan naar truck platooning en de eerste experimenten op de weg hebben reeds plaatsgevonden. Truck platooning is in het militaire domein technisch haalbaar en kan naar inschatting door experts binnen nu en drie jaar werkelijkheid worden. Er is nog wel een aantal belangrijke hiaten tussen wat er nu (civiel) beschikbaar is en wat militair gezien nodig is. Deze hiaten moeten gevuld worden om truck platooning in de militaire context te realiseren. Dit artikel sluit af met concrete aanbevelingen om de hiaten te vullen.
Dr. K.M. Malone, ir. J.P.M Vissers, ir. B.M. Gerrits, maj. A.F.P. de Wit*
Defensie kampt met een tekort aan chauffeurs in de logistieke keten. Er kan niet genoeg personeel worden geworven om alle chauffeursfuncties te vullen. Dit heeft er in de afgelopen jaren toe geleid dat de initiële bezettingsgraad van altijd 2 chauffeurs per vrachtwagen voor operationele ritten is verlaagd naar gemiddeld 1,6 chauffeur per voertuig. Met name tijdens missies is dit een probleem. Daarnaast is het zo dat de chauffeurs risico’s ondervinden bij het uitvoeren van hun operationele taak. Dit moet uiteraard zoveel als mogelijk worden beperkt. In lijn met de strategische doelstellingen voor een wendbare krijgsmacht en de zoektocht naar personeel-extensieve oplossingen is het wenselijk mogelijkheden te laten onderzoeken om de logistieke processen uit te voeren met minder personeel.

Zelfrijdende voertuigen leggen een parcours af tijdens de European Truck Platooning Challenge. Foto Infrastructuur en Waterstaat, Louis Meulstee
De innovaties op het gebied van truck platooning in de civiele markt bieden hier wellicht een uitkomst. Bij truck platooning zijn vrachtauto’s in een konvooi elektronisch aan elkaar gekoppeld, waarbij de voorste truck de snelheid en route bepaalt en de overige trucks automatisch volgen (de volgtrucks). Civiel wordt al veel onderzoek gedaan naar truck platooning en de eerste experimenten op de weg hebben al plaatsgevonden, onder andere de EU Truck Platooning Challenge.[1]
Als deze ontwikkelingen ook in de militaire context toepasbaar zijn, wordt het wellicht mogelijk om in (delen van) de logistieke keten met minder chauffeurs te rijden. Daardoor neemt zowel het risico op verminderde inzet door personele schaarste als het risico op letsel bij het personeel af.
In het nationale technologieproject (NTP) ‘Haalbaarheid van militaire truck platooning’ onderzocht TNO samen met het Opleidings- en Trainingscentrum Logistiek (OTCLog) van de Koninklijke Landmacht de haalbaarheid van truck platooning in de militaire context.[2] Dit artikel schetst in vogelvlucht de resultaten van dit onderzoek. Wat is truck platooning? Wat kan het voor Defensie betekenen? Hoe is truck platooning anders dan in een konvooi rijden met conventionele vrachtwagens? Wat zijn de verschillen tussen militair en civiel gebruik? En wat zijn aanbevolen acties om militaire truck platooning te realiseren?
Wat is truck platooning?
Truck platooning kan worden omschreven als het koppelen van twee of meer vrachtwagens in een konvooi, met behulp van connectiviteitstechnologie (technologie om een draadloze communicatieverbinding tussen de vrachtwagens mogelijk te maken) en geautomatiseerde rijondersteuningssystemen.[3] De vrachtwagen die voorop in het peloton rijdt, is de leider en de vrachtwagens die volgen houden automatisch een vaste afstand tussen elkaar aan (zie Figuur 1). Truck platooning gaat dus verder dan een gewenste snelheid en afstand tot de voorganger aanhouden (wat Adaptive Cruise Control (ACC) doet) omdat er een draadloze communicatieverbinding is tussen de voertuigen. Bij ACC is er alleen sprake van radar.

Figuur 1 Truck platoon met draadloze communicatie en radartechnologie[4]
De vergevorderde technische ontwikkelingen in de civiele toepassing van truck platooning kunnen de aanjager zijn voor de militaire toepassing, bijvoorbeeld het Europese project ENSEMBLE.[5] Dit project pakt de grootste issues met betrekking tot de ontwikkeling en het gebruik van truck platooning in het civiele domein op. De huidige technische civiele ontwikkeling focust op voertuig en platooning functionaliteit, onder andere multi-brand platooning,[6] human factors, communicatie, beveiliging van communicatie, verkeersveiligheid, (communicatie-)infrastructuur, en maatschappelijke impact.
In de civiele toepassing wordt in eerste instantie gereden met een chauffeur in de voorste vrachtwagen, die het hele peloton leidt, en met in alle volgtrucks één chauffeur die wordt ontzien van zijn rijtaak maar nog steeds alert moet zijn om de situatie te monitoren en in te kunnen grijpen als dat nodig is. Wat betreft omgeving wordt in eerste instantie gekeken naar het rijden op snelwegen. Op termijn wordt verwacht dat de volgtrucks onbemand kunnen zijn en dat er in andere omgevingen gereden kan worden, maar dit is niet iets wat op korte termijn te verwachten is.
Truck platooning voor Defensie
Wat is de waarde van truck platooning-technologie voor Defensie? De inspiratie voor truck platooning komt uit de civiele markt, waar zeer scherp gekeken wordt naar de baten en kosten.
Uit een maatschappelijke kosten-batenanalyse (MKBA) die TNO voor Rijkswaterstaat, SmartPort en Provincie Noord-Brabant uitvoerde, blijkt de potentieel grote maatschappelijke waarde van opgeschaalde truck platooning. Het zou leiden tot positieve effecten op de verkeersveiligheid en de emissiereductie. Figuur 2 vat de logistieke en maatschappelijke baten die berekend zijn in deze business case samen. De overkoepelende (maatschappelijke) business case hangt daarnaast ook af van het feit of er wel of geen chauffeurs in voertuigen nodig zijn.
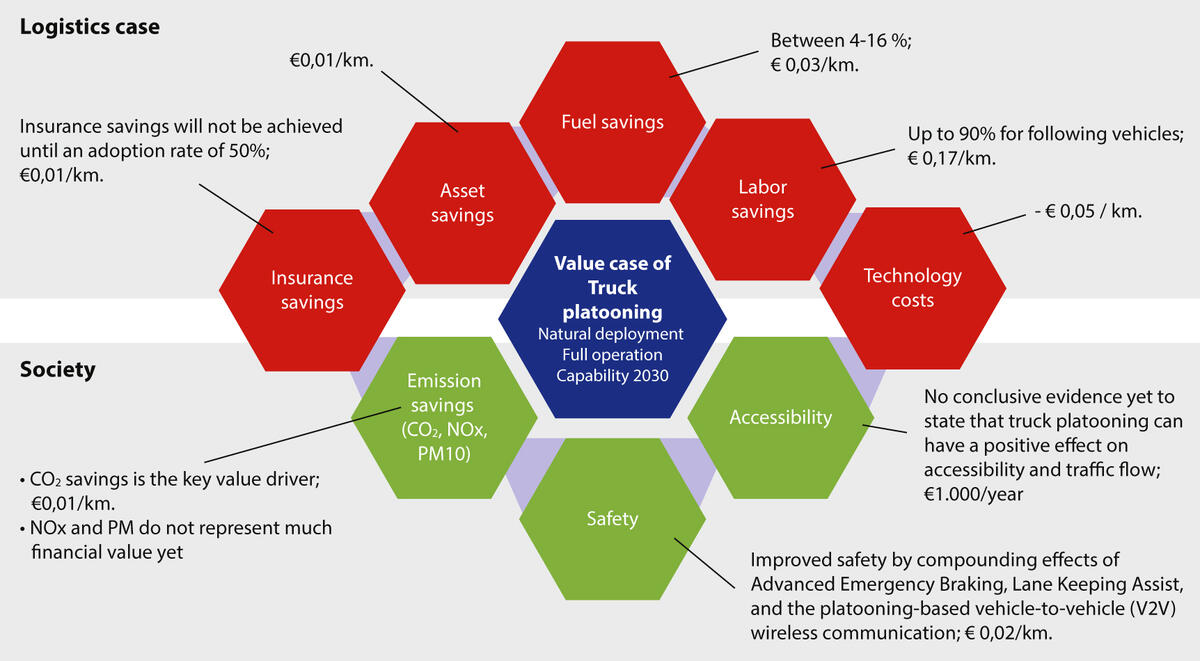
Figuur 2 Logistieke en maatschappelijke baten van truck platooning[7]
Voor de militaire toepassingen liggen de voordelen met name op het gebied van het vergroten van de veiligheid en een potentiele herverdeling van de chauffeurs over de trucks, door de veranderde taakverdeling van chauffeurs over de verschillende vrachtwagens wanneer platooning wordt toegepast.
In de huidige militaire logistiek zitten er bij operationele inzet in principe in ieder voertuig twee chauffeurs, met de volgende taken:
- besturing van de voertuigen;
- communicatie tussen de voertuigen over de onderlinge locatie;
- communicatie tussen de voertuigen over locatie en route;
- communicatie tussen de voertuigen met betrekking tot situational awareness (SA);
- communicatie tussen de konvooicommandant en operations (voorste voertuig);
- routebepaling (voorste voertuig);
- opdoen van SA en eventuele dreigingen signaleren (het voorste voertuig doet dit het meeste omdat dit als eerste een gebied binnenrijdt);
- elkaar wakker en alert houden;
- konvooi in de gaten houden (met name voorste en achterste voertuig, bijvoorbeeld signaleren als een voertuig stopt of problemen ondervindt);
- beveiliging van het konvooi bij onregelmatigheden;
- eventueel laden en lossen van goederen bij ophaal- en afleverpunt.
In een toekomst waarin truck platooning wordt toegepast, hangt het aantal benodigde chauffeurs onder andere af van het niveau van automatisering van de individuele vrachtwagens. In de civiele wereld ziet men op korte termijn zogeheten ‘support systemen’ als eerste vorm van automatisering. Bij deze systemen neemt het voertuig de rijtaak over, maar de chauffeur moet nog wel aanwezig zijn om de situatie te monitoren en de rijtaak over te nemen als dit nodig is.
In een vrachtwagen met dit supportsysteem zijn naar verwachting dus niet langer twee chauffeurs nodig, tenzij de overige taken (niet gerelateerd aan het besturen van de vrachtwagen) te veel zijn om door één chauffeur uit te laten voeren.[8] De vraag is: wat is mogelijk en wat is wenselijk?
Naast het terugbrengen van het aantal chauffeurs in de vrachtwagens kan truck platooning ook de veiligheid vergroten. Zo verkleinen de supportfuncties het risico op ongevallen, doordat er minder snelheidsvariaties ontstaan. Daarnaast kan truck platooning een oplossing zijn bij verminderd of slecht zicht en rijden in duisternis. Tot slot kan truck platooning interessante logistieke opties opleveren die zowel efficiëntie als veiligheid bevorderen, zoals optimale routeplanning.
Hoe is truck platooning anders in het militaire domein dan in het civiele?
In het civiele domein rijden vrachtwagens onder andere omstandigheden dan vrachtwagens in het militaire domein. In het civiele domein worden de benodigde sensoren en communicatie afgestemd met de omgeving en omstandigheden waarin een vrachtwagen verwacht wordt te functioneren, onder andere volgens de verkeersregels. Voor bijvoorbeeld het houden van een gespecificeerde afstand tot de voorganger wordt informatie uit de radar van de ACC van de eigen vrachtwagen en de gecommuniceerde informatie van de voorganger gebruikt. Voor de positionering van de vrachtwagen in de rijstrook wordt de wegbelijning gebruikt die camera’s waarnemen.
In het militaire domein kan de omgeving er heel anders uit zien. Voorbeelden van fysieke factoren die hierbij een rol spelen zijn: het ontbreken van wegbelijning of zelfs van wegen, andere verkeersregels, een chaotischer verkeersbeeld (rechtsboven) of abrupte overgangen van snelwegen naar wegen dwars door steden. Truck platooning in het civiele domein verwacht wegen met belijning. Voorbeelden van niet-fysieke factoren die een rol kunnen spelen zijn cyberdreigingen in vijandig militair gebied, zoals hacking, spoofing en sensor blinding van het systeem, die het functioneren van (civiele) truck platooning kunnen verstoren.

Een konvooi van Nederlandse militairen van Task Force Uruzgan in Afghanistan (2006). In het militaire domein kan de omgeving voor truck platooning er heel anders uitzien, bijvoorbeeld door het ontbreken van wegbelijning. Foto Beeldbank NIMH
Het militaire domein stelt eisen aan de toepassing van truck platooning, die niet grootschalig ontwikkeld worden in het civiele domein. Denk aan het gebruik van andere en soms complexe manoeuvres zoals het automatisch volgen van het spoor van de voorganger, achteruit rijden in een konvooi, of het rijden in een visgraatformatie. Aanvullend onderzoek om gedetailleerde specificaties te ontwikkelen is nodig. Het is goed mogelijk om deze complexe manoeuvres in stappen te ontwikkelen aangezien er een chauffeur is in het voertuig die tijdelijk de rijtaak kan overnemen als de manoeuvre op dat moment nog te complex is voor de techniek. Afhankelijk van het type missie kan van tevoren de inschatting worden gemaakt of een manoeuvre binnen de huidige specificaties van het systeem is uit te voeren. Mocht het niet mogelijk zijn, dan kan dit het startpunt zijn voor een pakket van eisen voor een verwervingstraject.
Verkenningen van de opties voor de toepassing van truck platooning binnen de Nederlandse krijgsmacht
Tijdens de TNO-studie zijn de eerste gedachten over de taakverdeling van de chauffeurs in truck platooning gevormd, onder andere op basis van workshops met beroepsmilitaire chauffeurs. Daar kwam een eerste concept uit en enkele basisprincipes.
Door de automatisering hebben de aanwezige chauffeurs meer tijd voor andere taken dan het besturen van de vrachtwagen. Gebaseerd op de huidige taken van en taakverdeling tussen de chauffeurs van de verschillende vrachtwagens kan in het geval van truck platooning het aantal chauffeurs als volgt over de vrachtwagens verdeeld worden (zie ook Figuur 3).
- Voorste vrachtwagen: de chauffeurs in de voorste vrachtwagen hebben extra taken ten opzichte van die in de andere vrachtwagens, zoals het bepalen van de route en het inschatten van dreiging. Om deze reden blijven daar naar verwachting twee chauffeurs nodig.
- Middelste vrachtwagens: in deze vrachtwagens kan het aantal chauffeurs wel verminderen. Als een platooning-systeem de rijtaak (deels) overneemt, kan één chauffeur per vrachtwagen voldoende zijn.
- Achterste vrachtwagen: het in de gaten houden van het konvooi (taak 9) is de enige taak die deze vrachtwagen extra heeft ten opzichte van de middelste vrachtwagens. De verwachting is dat dit geen dermate extra belasting is dat hierdoor meer chauffeurs nodig zijn in deze vrachtwagen dan in een middelste vrachtwagen. Ook hier kan één chauffeur dus voldoende zijn.

Figuur 3 Visuele weergave van de bestudeerde platoon configuratie
Binnen de studie is ook gekeken naar een hogere mate van automatisering waarbij gereden kan worden zonder chauffeurs in de volgtruck, de zogenaamde 2-0 configuratie (zie Figuur 4). In deze configuratie heeft de voorste vrachtwagen twee chauffeurs en de tweede nul. Dit gaat uit van een konvooi met maximaal twee vrachtwagens.
Tijdens gesprekken binnen Defensie kwam echter naar voren dat er een wens is om gemiddeld minstens één chauffeur per vrachtwagen te hebben. Deze wens komt voort uit het feit dat er voldoende beveiliging moet zijn binnen een konvooi. Mocht het automatische systeem falen en/of mocht er een complexe situatie optreden (bijvoorbeeld keren op zeer smalle wegen of navigeren door zeer complex terrein), dan is het wenselijk om tijdelijk weer handmatig te kunnen sturen.

Figuur 4 Visuele weergave van de 2-0 configuratie
Als we kijken naar de ontwikkeling binnen de wereld van de civiele truck zien we al wel ontwikkeling richting automatische voertuigen zonder een (backup-)chauffeur, maar dit gaat dan niet om de complexe omgevingen. Op grote schaal volledige automatisering van trucks in een militaire logistieke context is op korte termijn dan ook niet te verwachten. Wel is de verwachting dat binnenkort automatische voertuigen kunnen worden gebruikt binnen specifieke onderdelen van de militaire context, bijvoorbeeld in een specifiek geografisch gebied of terrein, of voor een specifieke taak. Hier kan platooning worden gezien als een uitbreiding op deze technieken voor automatisch rijden.
Wat gebeurt er al wel op militair gebied?
In de Verenigde Staten is truck platooning binnen Defensie al geruime tijd het onderwerp van onderzoek en veldtesten. Bij de Expedient Leader Follower (ExLF) demonstrator is de leidende vrachtwagen nog steeds bemand en zijn de volgvrachtwagens onbemand. Verder wordt daar automated-, driver-optional- en driver-assist-technologie[9] ontwikkeld ten behoeve van voertuigen voor het landoptreden. De Verenigde Staten en het Verenigd Koninkrijk werken ook samen aan platooning-technologie voor herbevoorrading als onderdeel van het logistieke proces.
Binnen de NATO Science and Technology Organization is platooning geen opzichzelfstaand onderwerp. Wel zijn er veel relevante aanpalende onderzoeken. Vooral de initiatieven rondom Unmanned Ground Vehicles (UGVs) en cybersecurity of military systems zijn interessant voor een militair platooning-systeem. Binnen de European Defense Agency (EDA) ontwikkelde het onlangs afgeronde Hy-MUP-project een hybride vloot van voertuigen met en zonder chauffeurs.[10]
Daarnaast blijkt uit interviews met de industriële partijen Rheinmetall en Scania dat de Europese defensie-industrie en voertuigfabrikanten met relevante technologische ontwikkelingen bezig zijn. Voorbeelden hiervan zijn de follow-me-functie van Rheinmetall, waarbij een automatisch geleid voertuig een persoon scant die moet worden gevolgd, waarna het voertuig op constante afstand de uitgestegen militair volgt, en de volledig autonome Scania-vrachtwagens in speciale afgesloten omgevingen zoals open mijnen in Australië en sneeuwschuivers op vliegvelden. Beide bedrijven zijn dan ook positief over de mogelijkheden en kansen van militaire truck platooning in de nabije toekomst.
Militair gebruik van truck platooning onder operationele omstandigheden
Het NTP ‘Haalbaarheid van militaire truck platooning’ onderzocht de huidige stand van de civiele truck platooning-techniek voor gebruik in de militaire omgeving. Aanpassingen van Tactics, Techniques, en Procedures (TTP’s) zijn niet behandeld. Hoewel voor een definitieve beschrijving van nieuwe TTP’s echt een diepgaande analyse noodzakelijk is met vertegenwoordigers van eenheden in een brigade- en bataljonsvak, is een korte analyse voor het gebruik van truck platooning in operationele omstandigheden hier wel op zijn plaats.
Het gebruik van nieuwe technologieën in conflictgebieden vereist bijna altijd dat nieuwe TTP’s ontwikkeld worden of dat bestaande TTP’s worden aangepast. Met betrekking tot truck platooning moeten de TTP’s rekening houden met, naast de techniek, de fysieke omstandigheden en dreigingssituatie. Gegeven de omstandigheden bepalen de TTP’s of de volgtrucks onbemand rijden, of bemand met één chauffeur.

Amerikaanse voertuigen van het Expedient Leader Follower-project, waarbij alleen het voorste voertuig bemand wordt. In de Verenigde Staten is truck platooning binnen Defensie al geruime tijd het onderwerp van onderzoek en veldtesten. Foto Oshkosh Defense
In de verwachte conflictomgeving van de nabije toekomst wordt de samenwerking tussen mens en machine steeds belangrijker. Mens-extensieve systemen zorgen voor meer effecten zonder dat daar meer personeel voor nodig is.[11] De omgeving waar eenheden opereren is vele malen groter en/of complexer geworden (fysiek, cognitief en virtueel). De tegenstander is technologisch dusdanig ver ontwikkeld dat een technologische voorsprong op hem niet gegarandeerd is. Concentratie van eenheden en middelen aan eigen zijde leidt tot verminderde overlevingskansen. Bij de operationele bevoorrading van eenheden kunnen door het gebruik van platooning-technologie dezelfde aantallen of mogelijk meer eenheden bevoorraad worden met minder chauffeurs. Door kleine verspreide pelotons (2-3 voertuigen) de bevoorrading te laten uitvoeren verkleint het aantal aan directe dreiging blootgestelde chauffeurs, waardoor de overige chauffeurs elders inzetbaar zijn en de logistieke keten robuuster wordt.
Als de technologie de eenvoudige (programmeerbare) handelingen van het rijden, het besturen van een voertuig en het navigeren overneemt, kan de aanwezige chauffeur zich concentreren op wat er om hem/haar heen gebeurt. De chauffeur wordt dan meer een operator en neemt waar, verzamelt informatie, houdt contact met eigen troepen, coördineert met de te bevoorraden eenheid of bedient in het geval van een aanval een wapen. Als er gereden wordt met twee chauffeurs in de lead-truck, en minimaal één chauffeur/operator in de volgtrucks, kan truck platooning in vele fysieke omgevingen ingezet worden. De aanwezigheid van ten minste één chauffeur/operator in elke truck geeft de fall back-mogelijkheid om de rijtaak over te laten nemen en de truck manueel te rijden of te besturen als het truck platooning-systeem dit niet meer kan. Bijvoorbeeld doordat het terrein of de route onherkenbaar zijn (geworden) voor de technologie of een bepaalde systeemcomponent uitvalt. Hetzelfde geldt voor de situatie waarin anders gereden moet worden vanwege fysieke dreiging of als de truck platooning-techniek uitvalt door een aanval. Specifieke manoeuvres zoals rijden in een visgraatformatie of achterwaarts door een hindernis of aanval kunnen dan uitgevoerd worden door de chauffeurs/operators. Voor deze personen, die primair geen chauffeur zijn, volstaat een basisopleiding op het voertuig voor dit soort noodzakelijke handelingen.
Conclusie en aanbevelingen
Defensie kampt met een tekort aan chauffeurs in bepaalde delen van de logistieke keten. Met name tijdens missies is dit een probleem. Momenteel wordt er altijd met twee chauffeurs per vrachtwagen gereden bij operationele inzet. Het gebruik van truck platooning kan het aantal benodigde chauffeurs omlaag brengen, met als bijkomend voordeel dat de veiligheid van het personeel verhoogd kan worden.
Technisch is het haalbaar om voor bepaalde omgevingen naar één chauffeur per volgvrachtwagen te gaan. De eerste vrachtwagen houdt wel zijn chauffeur met bijrijder. De chauffeur en/of bijrijder in de voorste vrachtwagen bepaalt de route en anticipeert als eerste op de situaties op de weg en in de omgeving. In het truck platoon zijn de volgvrachtwagens dan ook letterlijk slechts volgers, ze navigeren niet zelf. Dit geschetste beeld met één chauffeur per volgvrachtwagen betreft met name de technische haalbaarheid. Of het operationeel daadwerkelijk haalbaar en wenselijk is verdient nog een verdere studie, waarbij praktijkonderzoek zeker gewenst is.
In de geschetste truck platoon-configuratie moet de chauffeur wel betrokken blijven bij het rijden, met name om de omgeving te monitoren en de controle over de vrachtwagen direct te kunnen overnemen als dat nodig is. Te denken valt aan het uitvoeren van complexe manoeuvres zoals inhalen, achteruitrijden, et cetera.
Truck platooning in de militaire context kan binnen nu en drie jaar werkelijkheid worden. Er is nog wel een aantal belangrijke hiaten tussen wat er nu (civiel) beschikbaar is en wat militair gezien nodig is. Deze hiaten moeten gevuld worden om truck platooning in de militaire context te realiseren. In het al eerder genoemde TNO-rapport (zie ook noot 2) is een hele reeks defensie-specifieke technische en additionele eisen uiteengezet, zoals ‘military grade’-sensoren, radio’s en functies die typische militaire manoeuvres kunnen ondersteunen. Er moet dus op korte termijn worden ingezet op het geschikt maken van civiele truck platooning voor militair gebruik waarbij een samenwerking met een marktpartij in vrachtwagens gewenst is.

Truck platooning is technisch al goed mogelijk, maar de militaire context heeft specifieke implementatievoorwaarden. Foto MCD, Maartje Roos
Een concrete aanbeveling om militaire truck platooning te realiseren is om te starten met het testen van de civiel beschikbare implementaties en met prototypes en demo’s uit de civiele markt. Door daarmee ervaring op te doen en in kaart te brengen wat de additionele militaire eisen zijn, wordt nog specifieker duidelijk waarmee de civiele implementatie moet worden uitgebreid om geheel te voldoen aan de militaire inzet. Op basis hiervan kan een gedegen specificatie worden opgesteld voor verdere ontwikkeling en verwerving. Of deze testen volledig uitgevoerd kunnen worden met prototypes of demo’s uit de civiele markt moet verder onderzocht worden.
Deze testen zijn ook bruikbaar om operationele haalbaarheid en bijbehorende implementatievoorwaarden verder te onderzoeken. Zo moet onder andere verkend worden hoe de rol van de chauffeur er in detail uit gaat zien, wat de optimale taakverdeling is onder de verschillende chauffeurs, of de taken inhoudelijk ook wijzigen en of omscholing nodig is voor de chauffeurs om te leren omgaan met de platooning-technologie en de nieuwe manier van opereren. Mogelijk resulteert dit alles ook in benodigde aanpassing van de doctrine en van de logistieke concepten, eventueel met behulp van andere, niet aan platooning gerelateerde technologie. Wij denken dat truck platooning al in de nabije toekomst een grote en positieve rol kan gaan spelen binnen de defensielogistiek en hopen dat Defensie gaat investeren in tijd en onderzoek.
* Dr. K.M. Malone is Senior Scientist bij de afdeling Military Operations van TNO. Ir. J.P.M. Vissers is Senior System Architect bij de TNO-afdeling Integrated Vehicle Safety. Ir. B.M. Gerrits werkt als Senior Projectmanager bij de afdeling Integrated Vehicle Safety van TNO. Maj. A.F.P. de Wit is Bureauhoofd Operationele logistiek en doctrine, OTCO/OTCLOG/Kenniscentrum, Koninklijke Landmacht.
[1] Zie de website van de European Automobile Manufacturers Association (ACEA) over de EU Truck Platooning Challenge: https://www.acea.be/news/article/what-is-the-european-truck-platooning-challenge.
[2] Na de State-of-the-Art verkenningen is de operationele inzet van truck platooning verkend, rekening houdend met de mogelijke omgevingen, events en manoeuvres. Een beperkt aantal use cases heeft de exploratie van de operationele inzet concreet gemaakt. Specifieke onregelmatigheden zijn geïdentificeerd voor de verschillende delen van de distributieketen en met de geschetste omgevingen als achtergrond. Deze zijn daarna omgezet in use cases waarin het platoon acties zou moeten uitvoeren. De platoon acties zijn vervolgens vertaald naar functionele, additionele en technische eisen. Deze use cases en eisen zijn opgenomen in het TNO-rapport TNO 2020 R10234.
[3] ACEA, ‘Truck Platooning’, Brussel, 2017.
[4] E.D. van Ark, ‘Value Case Truck Platooning - an early exploration of the value of large-scale deployment of truck platooning’, TNO, Den Haag, TNO R11299 (2017) 16.
[5] Zie: https://platooningensemble.eu/.
[6] Truck platooning met vrachtwagens van verschillende fabrikanten.
[7] Van Ark, ‘Value Case Truck Platooning’, 20.
[8] Hierbij moet opgemerkt worden dat er voor taken 8, 10 en 11 mogelijk te weinig chauffeurs zijn. Echter, de verwachting is dat deze taken op andere wijze (deels) uitgevoerd kunnen worden, bijvoorbeeld door het inzetten van techniek (taken 8 en 10) of door ander personeel op de te bevoorraden locatie (taak 11). Dit is echter in dit onderzoek niet verder onderzocht.
[9] Automated, driver-optional en driver-assist betekenen voertuigtechnologieën respectievelijk zonder bestuurder, met of zonder bestuurder, of met bestuurder met rijtaakondersteuning.
[10] ‘EDA completes hybrid manned-unmanned platooning project’, Army Technology, 8 februari 2017. Zie: https://www.army-technology.com/uncategorised/newseda-completes-hybrid-manned-unmanned-platooning-project-5736015/.
[11] Operationeel Kader Landoptreden versie 86 (OKL), Commandant Landstrijdkrachten, mei 2020.