Image
In veel maritieme operaties vormt het proces van oppervlaktebeeldopbouw een belangrijke component. Door middel van simulatie is het mogelijk dit proces te verbeteren en daarmee de operationele effectiviteit van een maritieme operatie te verhogen. Daarom heeft de afdeling Military Operations van TNO een simulatiemodel voor maritieme oppervlaktebeeldopbouw ontwikkeld: SURPASS (afkorting van SURface Picture ASSessment). In dit model zijn de aspecten van maritieme oppervlaktebeeldopbouw in detail gemodelleerd. Het doel van simulatie met SURPASS is het verkrijgen van inzicht in de effecten van verschillende middelen voor beeldopbouw en van verschillende gebruikte tactieken. Met dit artikel beogen de auteurs het model en zijn toepassingsmogelijkheden bekend te stellen.
Ir. H.J. Fitski, ir. E.R. van Veldhoven en ir. B. Nienhuis*
De operaties van de Koninklijke Marine kunnen verdeeld worden in drie hoofdvormen:[1] maritieme gevechtsoperaties, maritieme veiligheidsoperaties en maritieme assistentie. Bij maritieme gevechtsoperaties gaat het om defensieve en offensieve activiteiten die gericht zijn tegen een militaire tegenstander, zoals onderzeebootbestrijding (anti-submarine warfare), amfibische operaties en ballistic missile defence. Onder maritieme veiligheidsoperaties vallen activiteiten gericht op rechtshandhaving, zoals de bescherming tegen piraterij, de bestrijding van smokkel en het handhaven van een embargo. Bij maritieme assistentie gaat het om operaties en activiteiten ter ondersteuning van de diplomatie of civiele autoriteiten, zoals vlagvertoon, search and rescue en het geven van noodhulp.
Sinds de jaren ’90 van de vorige eeuw is voor de marine het belang van maritieme veiligheidsoperaties en maritieme assistentie toegenomen. Vooral bij veiligheidsoperaties, maar ook bij een assistentie-operatie zoals search and rescue, is gedetailleerde en actuele informatie over de aanwezige scheepvaart in een gebied onontbeerlijk. Hiertoe is een goed proces van oppervlaktebeeldopbouw nodig. TNO’s simulatiemodel SURPASS kan hiervoor als tool gebruikt worden. SURPASS (SURface Picture ASSessment) is een applicatie waarmee het hele proces van oppervlaktebeeldopbouw gesimuleerd en inzichtelijk gemaakt kan worden.
Opzet artikel
Dit artikel beschrijft het model SURPASS en de wijze waarop met dit simulatiemodel de effectiviteit van een maritieme oppervlaktebeeldopbouwoperatie geëvalueerd en verhoogd kan worden. We geven eerst een overzicht van wat wij onder maritieme oppervlaktebeeldopbouw verstaan. Daarna gaan we in op de wijze waarop het proces van oppervlaktebeeldopbouw gemodelleerd is in het simulatiemodel SURPASS. Vervolgens bespreken we de invoer van het model en het simuleren van een scenario. Daaropvolgend geven we een aantal voorbeelden van de wijze waarop operaties in SURPASS zijn gemodelleerd en voorbeelden van toepassingen van SURPASS. Ten slotte werpen we een blik in de toekomst met betrekking tot het mogelijke gebruik van SURPASS.
Maritieme oppervlaktebeeldopbouw
Maritieme oppervlaktebeeldopbouw is, kort gezegd, het vergaren en vasthouden van informatie over oppervlakteschepen in een bepaald zeegebied.[2] Het geheel aan verzamelde informatie wordt het recognised surface picture genoemd. Het doel van oppervlaktebeeldopbouw is het opbouwen van een zo goed mogelijk recognised surface picture. De informatie over een schip kan bestaan uit verschillende onderdelen. De meest basale informatie is de kennis over de aanwezigheid van het schip (een contact). Een stap verder is het weten van de peiling waarop het schip zich bevindt of de positie van het schip, en nog een stap verder is kennis over de koers en vaart van het schip. Echt interessant wordt het pas als ook de karakteristieken van het schip bekend zijn, zoals het type, de klasse, de naam of het nummer, of zelfs de lading aan boord van het schip.

Surveillance-eenheden, waaronder helikopters, verzamelen informatie met verschillende typen sensoren. Foto AVDD
Naast de informatie die verzameld wordt tijdens de oppervlaktebeeldopbouw, is er ook vaak intel bekend. Het gaat dan bijvoorbeeld om gegevens over de maximale snelheid van bepaalde soorten schepen, verdachte vaarroutes, of de mogelijke dreiging van wapensystemen. Deze informatie kan invloed hebben op de manier waarop de oppervlaktebeeldopbouw wordt uitgevoerd. Een beeldopbouwoperatie wordt uitgevoerd door één of meer surveillance-eenheden. Voorbeelden hiervan zijn fregatten, helikopters, maritieme patrouillevliegtuigen en unmanned aerial vehicles (UAV’s). Bij het vergaren van de informatie maken deze eenheden gebruik van verschillende typen sensoren, waaronder radar, electronic support measures (ESM), infraroodsensoren en visuele middelen.
Typen operaties
Operaties waarvoor maritieme beeldopbouw belangrijk is, spelen zich overwegend in ondiepe (kust)wateren af. Bij zulke operaties kan gedacht worden aan crisisbeheersingsoperaties, zoals waarneming en controle, bewaking van een handels- of wapenembargo en interventie. Ook bij civiele taken kan beeldopbouw een rol spelen, zoals bij visserijcontroles en drugsbestrijdingsoperaties.
Vijf deelprocessen
In het proces van maritieme oppervlaktebeeldopbouw kunnen vijf deelprocessen worden onderscheiden: detectie, lokalisatie, herkenning, identificatie en tracking. Na detectie van een contact of een peiling worden middels lokalisatie de positie, koers en vaart van het contact bepaald. Herkenning houdt in het bepalen van bepaalde karakteristieken van een schip. Identificatie is het toekennen van een identiteit aan een contact (bijvoorbeeld hostile of friend) op basis van lokalisatie- en herkenningsinformatie. Dit gebeurt volgens zogeheten IDCRITS (identification criteria). Tracking is het vasthouden van eerder verkregen informatie over een contact. Idealiter gebeurt dat door alle schepen binnen het detectiebereik te houden. Omdat dit in het algemeen onmogelijk is, is het belangrijk om een contact, dat het detectiebereik van een surveillance-eenheid heeft verlaten, bijtijds opnieuw waar te nemen. Dit wordt revisiting genoemd.
Afhankelijk van de informatie die tijdens het beeldopbouwproces wordt vergaard, zijn vervolgacties noodzakelijk. Een mogelijke vervolgactie is de inzet van een wapen, bijvoorbeeld een anti-ship missile, tegen een militair contact dat als vijandig is geïdentificeerd. In een embargo-operatie kan het nodig zijn de kapitein van een schip te ondervragen of een boarding-actie uit te voeren met fregat, helikopter, of snelle interceptieboot – de zogenoemde rigid hull inflatable boat (RHIB) – om de lading van een schip te controleren. Een andere vervolgactie is het escorteren van een schip naar een haven.
Het model SURPASS
SURPASS is een door TNO ontwikkeld simulatiemodel voor het proces van maritieme oppervlaktebeeldopbouw. Het model verschaft inzicht in de effecten van verschillende middelen voor beeldopbouw en van verschillende gebruikte tactieken. Deze kennis kan bijvoorbeeld worden gebruikt voor optimalisering van huidige tactieken, of bij de aanschaf van nieuwe systemen of platformen. Het model SURPASS simuleert de onderdelen van het beeldopbouwproces in detail. We onderscheiden vier typen activiteiten in het model: sweeping, lokalisatie, herkenning, en revisiting.
Sweeping is het volgen van een vooraf gedefinieerd vaar- of vliegpatroon om zodoende nieuwe contacten te kunnen detecteren. Deze activiteit wordt uitgevoerd als er geen contacten zijn waarover meer informatie kan of hoeft te worden vergaard of vastgehouden. Lokalisatie is het vaststellen van de positie, koers en vaart van een contact. Deze activiteit kan worden opgestart nadat er een nieuw contact is gedetecteerd of wanneer een bestaand contact zijn koers of vaart wijzigt.
Herkenning is het vaststellen van bepaalde karakteristieken van een contact. Bij deze activiteit kan gebruik worden gemaakt van informatie over de koers en vaart van het contact om een goede interceptiekoers te berekenen. In overleg met de KM is een onderscheid gemaakt in vier niveaus van herkenning. Op herkenningsniveau 1 is vastgesteld of het schip militair of niet-militair is. Op niveau 2 is het scheepstype vastgesteld, bijvoorbeeld of het om een fregat of om een tanker gaat. Op niveau 3 is de scheepsklasse is vastgesteld. Dit is, vanzelfsprekend, met name van belang voor militaire schepen. Als laatste is op niveau 4 de scheepsnaam of het scheepsnummer vastgesteld. Revisiting betreft het opheffen van de onzekerheid in de positie van een schip dat buiten het sensorbereik van de eenheden is geraakt, met als doel de eerder vergaarde informatie over het schip vast te houden.

Een interceptieboot (RHIB) biedt de mogelijkheid om de lading van een schip snel te controleren. Foto AVDD
Tijdens een operatie zal steeds opnieuw moeten worden gekozen tussen het zoeken naar nieuwe contacten (sweeping), het onderzoeken van gedetecteerde contacten (lokalisatie en herkenning) en het op tijd weer bezoeken van eerder gedetecteerde contacten (revisiting). Er is dus steeds een afweging[3] tussen het vergaren van nieuwe informatie en het vasthouden van eerder verkregen informatie. Afhankelijk van het type operatie kan, op basis van de gedefinieerde IDCRITS, een standard identity[4] of een Maritime Interdiction Force (MIF) identity[5] aan een schip worden toegekend. In SURPASS zijn naast het beeldopbouwproces ook enkele vervolgacties gemodelleerd. Het is mogelijk om een boarding-actie uit te voeren met behulp van een fregat, een helikopter of een RHIB. Ook kan bijvoorbeeld een van drugssmokkel verdacht schip worden tegengehouden door inzet van niet-letale wapens, zoals netten.[6]
Invoer van het model
In SURPASS kan een scenario worden gebouwd door een aantal bouwstenen te definiëren en deze samen te voegen tot het scenario. Het voordeel van deze aanpak is dat eenmaal gemaakte bouwstenen in verschillende scenario’s (her)gebruikt kunnen worden. De belangrijkste bouwstenen zijn het zeegebied, de aanwezige scheepvaart, de beschikbare surveillance-eenheden met hun sensoren, de surveillancetactieken en de IDCRITS.
Zeegebied en aanwezige scheepvaart
Het zeegebied definieert de area of operations. In het zeegebied kunnen obstakels aanwezig zijn, zoals eilanden en olieplatformen, die de sensoren en bewegingen van surveillance-eenheden kunnen hinderen. Het is mogelijk om één of meer deelgebieden aan te wijzen als area of responsibility voor een surveillance-eenheid. Een surveillance-eenheid zal dan alleen binnen dat aangewezen gebied opereren. Voor de scheepvaart kunnen shipping lanes worden aangegeven. Voor de aanwezige scheepvaart zijn in SURPASS verschillende scheepstypen gemodelleerd, waaronder vijandelijke oorlogsschepen, vrachtschepen, kustvaarders, vissersboten en motorboten. De definitie van een schip wordt bepaald door onder meer de minimale en maximale vaart, mogelijke wijzigingen in koers en vaart, een eventueel te volgen shipping lane en een mogelijk wapenbereik tegen elk type surveillance-eenheid.
Surveillance-eenheden
Er zijn momenteel vier categorieën surveillance-eenheden beschikbaar. De eerste categorie omvat de varende eenheden. Hieronder vallen bijvoorbeeld fregatten en patrouilleschepen. De tweede categorie bevat de vliegende eenheden die vanaf een varend platform opereren en slechts een beperkte endurance hebben. Hierbij gaat het om helikopters of UAV’s. De derde categorie omvat de overige vliegende eenheden, waarbij men kan denken aan maritieme patrouillevliegtuigen. De laatste categorie bevat de varende eenheden die vanaf een varend platform opereren en slechts een beperkte endurance hebben. Op dit moment zit in deze categorie alleen de RHIB, die kan worden ingezet voor de boarding van een schip. Typische parameters van een surveillance-eenheid zijn de maximale snelheid, operationele hoogte, beschikbaarheid, endurance en de sensoren aan boord.
Sensoren
Voor de sensoren van de surveillance-eenheden wordt onderscheid gemaakt tussen actieve, semi-actieve, en passieve sensoren. Een voorbeeld van een actieve sensor is de radar. Semi-actieve sensoren zijn bijvoorbeeld infrarode en visuele middelen. Bij passieve sensoren kan gedacht worden aan ESM en passieve sonar. Elke sensor wordt gekarakteriseerd door de detectie- en eventuele herkenningsafstanden (voor maximaal de vier eerder genoemde niveaus van herkenning) van die sensor tegen de verschillende scheepstypen. Afhankelijk van het type sensor zijn verschillende afstanden mogelijk voor dag en nacht, en voor verschillende sensorhoogten.
Tactieken
De surveillancetactieken bestaan uit een groot aantal aspecten. Allereerst is er de keuze van het vaar- of vliegpatroon (zoekpatroon) dat gebruikt wordt voor de sweeping-activiteit. Voorbeelden van in SURPASS gemodelleerde patronen zijn een ladderpatroon (waarbij parallelle tracks worden gevolgd), binnen- en buitenwaartse spiralen en een random-patroon. De kern van een tactiek bestaat echter uit de eerder genoemde voortdurende afweging tussen het zoeken naar nieuwe contacten, het onderzoeken van gedetecteerde contacten en het vasthouden van informatie over eerder onderzochte contacten. In SURPASS zijn verschillende tactieken gemodelleerd. Zo is er bijvoorbeeld de mogelijkheid te kiezen tussen een single of een commanded tactiek voor het onderzoeken van nieuwe contacten. Bij de single tactiek nemen alle eenheden autonoom beslissingen en onderzoeken ze de door henzelf gedetecteerde contacten. Bij de commanded tactiek worden alle beslissingen genomen door een task force commander. Er kan, indien nodig, rekening gehouden worden met een mogelijke wapendreiging door scheepvaart. Dit omvat de bepaling van de minimale afstand (stand-off range) tot een contact, gegeven de beschikbare informatie over dat contact, en de manier waarop de eenheid zijn route kiest, rekening houdend met de gekozen stand-off ranges.
De wijze van sensorinzet is ook onderdeel van de tactiek. Bij gebruik van een actieve sensor zoals de radar kan het nodig zijn om de kans op counterdetectie te verminderen. Schepen kunnen bijvoorbeeld reageren op radar door te ontwijken of stil te gaan liggen. Onderdelen van de radartactiek zijn de mogelijkheid slechts in een bepaalde richting radar in te zetten (sector-scanning) en het intermitterend gebruik van radar.
Verder zijn er tactieken voor het onderzoeken van passieve detecties (ESM- en akoestische peilingen). In SURPASS gemodelleerde voorbeelden hiervan zijn cross-fix, running fix en het afgaan op een enkele peiling. Bij een cross-fix (kruispeiling) worden twee peilingen van verschillende surveillance-eenheden gecombineerd om de locatie van een contact te bepalen. Bij een running fix is er slechts één peiling beschikbaar, en gaat een (vliegende) eenheid een koers volgen die een bepaalde hoek maakt met de initiële peiling, totdat de peiling van het contact voldoende is veranderd. Dit levert een cirkelvormig onzekerheidsgebied op voor de positie van het contact, waarbij de grootte van het onzekerheidsgebied afhangt van de snelheid van de eenheid en de (geschatte) mogelijke snelheid van het contact. Bij de derde tactiek gaat een surveillance-eenheid af op een enkele peiling, met als het doel het bijbehorende schip met een andere sensor te detecteren.
IDCRITS
In de IDCRITS worden de criteria vastgelegd voor het toekennen van een bepaalde identiteit (zoals eerder beschreven een standard identity of een MIF identity) aan een contact. De invulling van de IDCRITS is gerelateerd aan het doel van de missie. Bijvoorbeeld, in een drugsbestrijdingsoperatie kan een vrachtschip als Cleared Vessel worden beschouwd, terwijl in een embargo-operatie een vrachtschip mogelijk een Critical Contact Of Interest wordt.
Simulatie van een scenario
De bepaling van de effectiviteit van een oppervlaktebeeldopbouwoperatie met SURPASS gebeurt in drie stappen. Eerst wordt een scenario gedefinieerd door de noodzakelijke afzonderlijke bouwstenen van dat scenario (zoals gebied, scheepvaart, scheepsdichtheden, eenheden, sensoren en tactieken) vast te leggen en het scenario op te bouwen uit deze onderdelen. Vervolgens wordt het scenario gedurende een zekere periode gesimuleerd. Hierbij worden verschillende aspecten, onder meer van de scheepvaart, met behulp van random-processen gemodelleerd. Ten slotte worden de resultaten van de simulatie gepresenteerd en geanalyseerd.
De simulatie kan in SURPASS op twee manieren gedaan worden. De eerste is met een grafische weergave. Hierbij wordt een bovenaanzicht van het zeegebied, met daarin de bewegingen van scheepvaart en eenheden, op het scherm getoond. Tevens is de huidige vergaarde informatie, zoals de behaalde herkenningsniveaus van de schepen, zichtbaar. De simulatiesnelheid kan zelf gekozen worden. Deze manier van simulatie is met name geschikt voor analyse van simulatieresultaten en voor demonstraties van het model. De tweede manier van simulatie is via de zogenoemde batch mode. Hierbij worden één of meer scenario’s gedurende een zekere periode as fast as possible gesimuleerd, waarbij veel tijd wordt bespaard doordat het verloop van de simulaties niet grafisch wordt getoond.

Het simuleren van oppervlaktebeeldopbouw maakt SURPASS zeer geschikt voor trainings- en onderwijsdoeleinden en draagt bij aan een betere uitvoering in de praktijk. Foto AVDD
Random-processen en hun invloed op de simulatieperiode
Het gebruik van random-processen tijdens de simulatie zorgt ervoor dat de simulatie realistische resultaten oplevert. Doordat bijvoorbeeld de vaart en de koerswijzigingen van de scheepvaart geloot worden, kan worden voorkomen dat de simulatieresultaten afhankelijk zijn van één specifieke situatie. Ook in de werkelijkheid is immers niet alles exact bekend en speelt het toeval een rol. Omdat er dus gesimuleerd wordt met wisselende situaties, is het voor het verkrijgen van betrouwbare simulatieresultaten wel noodzakelijk dat de simulatieperiode lang genoeg is: op die manier kan een ‘gemiddeld’ resultaat bepaald worden over verschillende situaties. Dit is te vergelijken met het bepalen van de gemiddelde uitkomst van een worp met een dobbelsteen, door een aantal keer met een dobbelsteen te gooien en dan telkens het gemiddelde van de uitkomsten te bekijken: aanvankelijk zal het gemiddelde na iedere volgende worp nog behoorlijk wijzigen, maar na een groot aantal worpen blijft het gemiddelde ongeveer 3,5.
Uitvoer van het model
Het doel van de simulatie van een oppervlaktebeeldopbouwoperatie is het bepalen van de operationele effectiviteit. In SURPASS zijn verschillende effectiviteitsmaten beschikbaar om deze effectiviteit te bepalen. Welke effectiviteitsmaten nodig zijn, is afhankelijk van het doel van de operatie en/of de onderzoeksvraag die hieraan gerelateerd is.
Ten eerste wordt, vanzelfsprekend, de gemiddelde kwaliteit van het recognised surface picture bijgehouden. Deze effectiviteitsmaat geeft aan hoeveel informatie er vergaard is, als percentage van de maximaal te behalen hoeveelheid informatie. Deze maat kan dus worden gezien als een gemiddelde over de tijd van de kwaliteit van het oppervlaktebeeld. Een andere belangrijke effectiviteitsmaat is het percentage positive identities, dat wil zeggen het percentage schepen waaraan minstens eenmaal een positive identity[7] is toegewezen. Deze maat wordt zowel per scheepstype bepaald als voor alle schepen in het scenario tezamen. In bijvoorbeeld een embargo-operatie is een relevante effectiviteitsmaat het percentage koopvaardijschepen dat een positive identity heeft gekregen.
Naast deze twee effectiviteitsmaten worden onder meer de verdeling van herkenningsniveaus en toegekende identities over de simulatietijd, eventuele risico’s die de eenheden hebben gelopen als gevolg van wapens aan boord van de scheepvaart, en de effectiviteit van niet-letale wapens zoals netten bijgehouden. Alle effectiviteitsmaten kunnen in SURPASS bekeken worden als grafieken. Daarnaast kunnen de resultaten van simulaties direct worden geëxporteerd naar Microsoft Excel, waardoor het mogelijk is de resultaten van verschillende simulaties te combineren en te visualiseren.
Modellering van operaties
In SURPASS zijn voor verschillende operaties tactieken gemodelleerd. We zullen nu ingaan op de modellering van twee typen operaties: search and rescue (SAR), en een maritieme interdictie-operatie (MIO), waarin drugssmokkelaars onderschept moeten worden. Hiermee willen we een indruk geven van de aspecten die bij deze operaties een rol spelen en hoe we deze aspecten in SURPASS gemodelleerd hebben.
Search and rescue
Een belangrijk voorbeeld van een civiele taak van de marine is search and rescue. De modellering van SAR-operaties in SURPASS is gebaseerd op de richtlijnen die beschreven staan in de International Aeronautical and Maritime Search And Rescue (IAMSAR) Manual.[8] Deze manual wordt gezamenlijk uitgegeven door de International Civil Aviation Organization (ICAO) en de International Maritime Organization (IMO). In deze manual wordt gedetailleerd beschreven hoe in een SAR-operatie één of meerdere zoekeenheden ingezet moeten worden.
De in de manual gehanteerde strategie werkt, globaal gezien, als volgt. Eerst wordt de optimale grootte van het zoekgebied bepaald. Dit wordt gedaan aan de hand van diverse gegevens van het doel (zweef- en drijfsnelheden, onzekerheden in positie, type doel) en van de zoekeenheid (snelheid, endurance, sensorcapaciteiten). Daarna wordt het zoekpatroon binnen het zoekgebied gekozen. Wanneer het hele zoekgebied (tevergeefs) is doorzocht of wanneer de zoekeenheid tijdelijk moet terugkeren vanwege een beperkte endurance, wordt een nieuw zoekgebied bepaald, op basis van de laatst bekende gegevens en de reeds verstreken tijd. Het aanbevolen zoekpatroon kan hierbij ook wijzigen.
Het zoekgebied is een rechthoek die wordt bepaald door de laatste positiemelding door het doel, de verstreken tijd sinds die melding, de stroming, de drift error, de leeway en de leeway divergence. De stroming is de combinatie van de getijstroom en de oppervlaktestroming die wordt veroorzaakt door de directe invloed van de wind op het zeeoppervlak. De drift error is het maximale verschil tussen de geschatte huidige positie en de werkelijke positie van het doel, dat ontstaat door variaties in stroming en wind. De leeway is de gemiddelde richting van de verplaatsing van het doel door de directe invloed van de wind op het doel. De leeway is een onzekere factor, omdat deze niet alleen afhangt van de windkracht en -richting, maar ook van welke delen van het doel zich boven en onder het zeeoppervlak bevinden. Hiertoe wordt de leeway divergence gebruikt, die de maximale afwijking van de gemiddelde leeway aangeeft. De berekening van het zoekgebied wordt schematisch weergegeven in figuur 1.
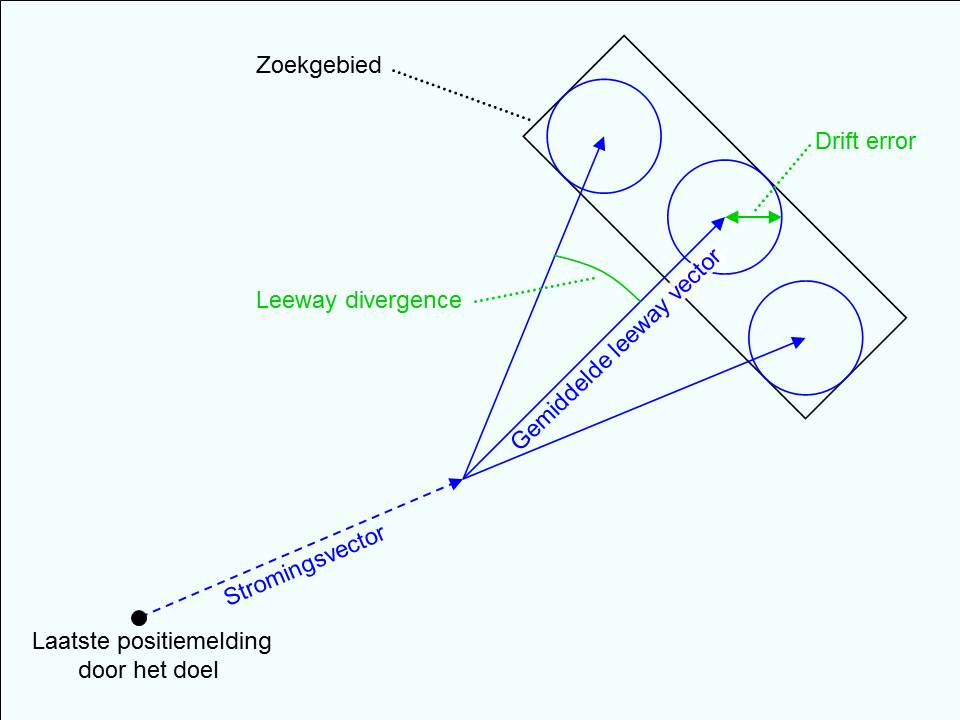
Figuur 1 Bepaling van het zoekgebied voor search and rescue
De IAMSAR Manual beschrijft verschillende zoekpatronen. Twee visuele zoekpatronen hiervan zijn in SURPASS gemodelleerd: de parallel sweep search en de expanding rectangle search. De parallel sweep search is een ladderpatroon waarbij een aantal parallelle tracks wordt afgezocht, met een vaste afstand tussen de tracks (track spacing) en een afstand tot de randen van het zoekgebied (border spacing) die de helft is van de track spacing. De expanding rectangle search is een spiraalvormig patroon, ook met een vaste track spacing en een border spacing die de helft is van de track spacing.
De track spacing en de hiervan afgeleide border spacing worden zodanig bepaald dat precies één volledig patroon kan worden gevolgd binnen een maximale zoektijd voor het zoekgebied. Deze maximale zoektijd kan gebaseerd worden op de ‘drijftijd’ van het doel, de endurance van de surveillance-eenheid, de verwachte tijd dat het doel zich (nog) binnen het zoekgebied bevindt, en de tijd die nodig is om het hele gebied te bestrijken met de sensor met het kleinste detectiebereik. Om te bepalen hoe effectief een SAR-operatie is uitgevoerd, worden als effectiviteitsmaten bijgehouden wat de kans is dat het doel ‘levend’ wordt gevonden (op basis van de verwachte overlevingstijd van de drenkelingen) en wat de kans is dat het doel hoe dan ook gevonden wordt.
Onderscheppen van drugssmokkelaars
In het TNO-onderzoeksprogramma Simulation Based Performance Assessment (SBPA) is een methodiek ontwikkeld voor de integrale performance assessment van een platformontwerp. Binnen dit onderzoeksprogramma is als casestudy de relatie tussen de eis aan de maximale snelheid van een patrouilleschip en de operationele effectiviteit in een maritieme interdictie-operatie geanalyseerd.[9] De Defensie Materieel Organisatie (DMO) wilde hiermee aantonen dat van de door de behoeftesteller gedefinieerde effectiviteitseisen (bijvoorbeeld hoeveel go-fasts moeten er gestopt kunnen worden) de prestatie-eisen (bijvoorbeeld de maximale snelheid van het patrouilleschip) moeten worden afgeleid (en niet andersom).
In deze maritieme interdictie-operatie surveilleert een patrouilleschip, met een helikopter en een RHIB aan boord, in een gebied waarin drugssmokkelaars opereren. Verdachte schepen moeten worden opgespoord, onderschept en onderzocht. Het patrouilleschip en de helikopter worden als surveillance-eenheid ingezet. De RHIB wordt alleen gebruikt om het boarding-team vanaf het patrouilleschip naar en van een aangehouden schip te brengen. De surveillance-eenheid die een contact gedetecteerd heeft, voert ook de herkenning uit om te bepalen of het contact een mogelijke drugssmokkelaar is. Als het contact inderdaad een mogelijke drugssmokkelaar blijkt te zijn, wordt geprobeerd om hem te onderscheppen en tot stoppen te dwingen.
Als de helikopter beschikbaar is en voldoende endurance heeft, zal deze naar de mogelijke smokkelaar toevliegen en erboven gaan hangen tot hij stopt. Het patrouilleschip zal intussen met maximale snelheid ook koers zetten richting het verdachte schip, tot op een bepaalde ‘veilige afstand’. Als de helikopter niet beschikbaar is, zal het patrouilleschip met maximale snelheid het verdachte schip proberen te onderscheppen en hem tot stoppen proberen te dwingen met een schot voor de boeg. In SURPASS is het stoppen van een mogelijke drugssmokkelaar gemodelleerd als een zekere tijd die daarvoor nodig is, gemeten vanaf het moment dat de helikopter boven het schip hangt of het patrouilleschip binnen schootsafstand is. De onderschepping van een smokkelaar wordt schematisch weergegeven in figuur 2.
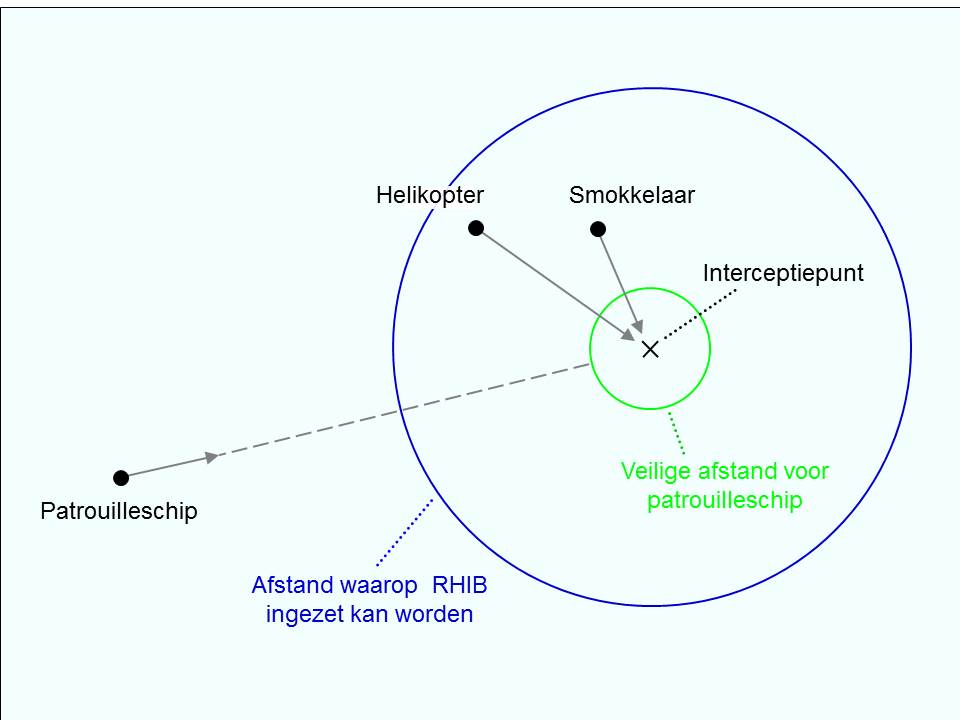
Figuur 2 Onderschepping van een smokkelaar door helikopter en patrouilleschip
Zodra de smokkelaar gestopt is, kan vanuit het patrouilleschip een RHIB met het boarding-team vertrekken. Het moment waarop de RHIB wordt ingezet hangt echter nog af van twee andere factoren: de maximale afstand waarop de RHIB kan worden ingezet en de sea state. Als gevolg van de sea state kan het namelijk zo zijn dat het patrouilleschip sneller is dan de RHIB. In dat geval wordt de RHIB pas ingezet zodra het patrouilleschip bij het verdacht schip is. Wanneer het boarding-team de boarding-actie voltooid heeft, keert de RHIB terug naar het patrouilleschip en gaan de surveillance-eenheden weer door met het detecteren van contacten.
Als effectiviteitsmaat is in de casestudy gekeken naar het aantal drugssmokkelaars dat aangehouden is, als fractie van het aantal drugssmokkelaars dat gedetecteerd is. Op deze manier wordt alleen de operationele effectiviteit van het onderscheppen van de smokkelaars geëvalueerd, en niet de effectiviteit van het opsporen (hierbij vaart het patrouilleschip namelijk niet met maximale snelheid). Resultaat van de casestudy was dat de maximale snelheid van het patrouilleschip direct gekoppeld was aan de effectiviteit van de missie: hoe hoger de snelheid, hoe (significant) hoger de effectiviteit.
SURPASS in de praktijk
Om een beeld te schetsen van mogelijke toepassingen van SURPASS, zullen we kort ingaan op drie terreinen waarvoor SURPASS in de afgelopen jaren is gebruikt: operationele planning, vergelijking van alternatieven en training en onderwijs.
Operationele planning
De wijze waarop een eenheid wordt ingezet kan heel bepalend zijn voor de effectiviteit van de operatie die wordt uitgevoerd. Hoewel sommige aspecten van de inzet gegeven zijn, zoals de snelheid en de endurance, blijven er veel aspecten over waar keuzes voor gemaakt moeten worden. Denk hierbij aan het zoekpatroon dat gebruikt wordt, de afstand tussen de tracks van het patroon (track spacing), de wijze waarop contacten worden onderzocht (hoe ver mag er bijvoorbeeld van een track worden afgeweken?) en het toewijzen van areas of responsibility aan de verschillende eenheden.
Een voorbeeld hiervan was de operationele planning van de inzet van P-3C Orion maritieme patrouillevliegtuigen voor de bestrijding van drugstransporten in het Caribisch gebied. Tot de opheffing van de Groep Maritieme Patrouillevliegtuigen in 2005, werd de planning van de vluchten van de Orions van de toenmalige Marine Luchtvaartdienst (MLD) verzorgd door de afdeling Mission Support. In het kader van kustwachtoperaties waren twee Orions op de vliegbasis Curaçao gestationeerd. Vanaf 1998 is SURPASS door de afdeling Mission Support gebruikt voor de missieplanning van de P-3C Orions bij drugsbestrijdingsoperaties in het Caribisch gebied.
Vergelijking van alternatieven
Bij de aanschaf van een nieuw platform zijn er vaak verschillende kandidaten, elk met hun eigen kenmerken en mogelijkheden, waardoor het vaak lastig is om een goede afweging te maken. Een kandidaat-platform kan op het ene punt beter zijn dan de andere platformen, maar op een ander punt slechter. Door nu bepaalde operaties te simuleren met de verschillende kandidaten kan gekeken worden met welk platform de hoogste overall operationele effectiviteit te behalen is. Voor de vervanging van de Westland Lynx helikopter heeft TNO in 2000 twee mogelijke opvolgers met elkaar vergeleken: de nieuwe NH90 versus de Super Lynx (een verbeterde versie van de oude Lynx). In 2010 heeft de Deense Defence Acquisition and Logistics Organization (DALO) SURPASS aangeschaft voor een vergelijkbare evaluatie, namelijk van een aantal kandidaat-helikopters voor kustwachttaken en crisisbeheersingsoperaties. In 2008 heeft het Noorse Forsvarets forskningsinstitutt (FFI) SURPASS aangeschaft ter evaluatie van de fregatten van de Nansen-klasse.
Met behulp van SURPASS kunnen ook verschillende sensor payloads van een platform met elkaar worden vergeleken. Een voorbeeld hiervan was de analyse van alternatieve sensorcombinaties van de NH90 en Super Lynx. De sensor suite van de NH90 bestond uit inverse synthetic aperture radar (ISAR), ESM, infrarood en visuele middelen. De Super Lynx beschikte over imaging radar, ESM, forward looking infra-red (FLIR) en visuele middelen. Voor elk van de vier sensoren van de helikopter werd de situatie geanalyseerd waarin deze sensor niet beschikbaar was. Hierdoor werd de ‘toegevoegde waarde’ van de sensor bepaald. Uit de simulaties met SURPASS bleek dat de toegevoegde waarde van de radar het grootst is. De toegevoegde waarde van infrarood en ESM daarentegen is relatief klein.
Training en onderwijs
SURPASS verschaft direct inzicht in de operationele effectiviteit van verschillende tactieken. Dit maakt het model zeer geschikt voor trainings- en onderwijsdoeleinden. Het is bijvoorbeeld mogelijk om te experimenteren met verschillende keuzes voor het zoekpatroon en de toewijzing van surveillance-eenheden aan bepaalde areas of responsibility. Tijdens lessen Operationele Analyse bij de Koninklijke Marine (OAKM) wordt SURPASS als visueel onderwijstool gebruikt om aan NLDA-studenten de effecten te tonen van het uitvoeren van verschillende tactieken.
De toekomst
In de afgelopen jaren heeft SURPASS reeds zijn nut bewezen, maar er zijn ook voorbeelden van mogelijke toekomstige toepassingen van het model. Zoals eerder vermeld, is SURPASS in het verleden gebruikt voor de missieplanning van de P-3C Orion maritieme patrouillevliegtuigen bij drugsbestrijdingsoperaties in het Caribisch gebied. Nu kan SURPASS worden gebruikt bij de operationele planning van de NH90 helikoptervluchten tijdens counter piracy-operaties in Somalië.[10] SURPASS kan worden gebruikt ter ondersteuning van het opstellen van eisen aan toekomstige sensoren en platformen. Door uit te gaan van een bepaalde minimaal gewenste operationele effectiviteit (bijvoorbeeld een minimaal gewenste kwaliteit van het recognised surface picture) kunnen eisen aan nog te ontwikkelen technologieën worden bepaald (operational technology assessment). Te denken valt aan de minimaal gewenste sensorbereiken voor detectie en herkenning na de CUP (capability upgrade programme) van het M-fregat of de vervanging van de onderzeeboten van de Walrusklasse en de minimaal gewenste snelheid en endurance van toekomstige moederschepen en UAV’s.
Met behulp van SURPASS kan inzicht worden verkregen in mogelijke operatieconcepten van UAV’s en hun mogelijke bijdrage aan het proces van oppervlaktebeeldopbouw. Te denken valt aan analyses met verschillende waarden voor de aan te houden stand-off ranges, aangezien geen rekening hoeft te worden gehouden met mogelijk gevaar voor de bemanning.
* Hilvert Fitski en Edwin van Veldhoven zijn beiden werkzaam bij de afdeling Military Operations van TNO en houden zich bezig met het thema Defensie en Veiligheid. Bart Nienhuis werkt bij de Defensie Materieel Organisatie (DMO).
[1] Grondslagen van het Maritieme Optreden, Nederlandse maritiem-militaire doctrine (Den Haag, ministerie van Defensie, 2014).
[2] H.J. Fitski en M.J.H.B. Grob, ‘Simulatie van maritieme oppervlaktebeeldopbouw’, in: Marineblad 111 (2001) (2) 47-51.
[3] M.J.H.B. Grob, ’Routing of Platforms in a Maritime Surface Surveillance Operation’, in: European Journal of Operational Research (EJOR) 170 (2006) (2) 613-628.
[4] De volgende standard identities zijn mogelijk: Unknown (U), Suspect (S), Assumed Friend (AF), Hostile (H), Neutral (N) en Friend (F). De laatste drie identities zijn zogeheten ‘positive’ identities, dat wil zeggen: ze vertegenwoordigen het hoogst haalbare niveau van informatie.
[5] De mogelijke MIF identities zijn: Contact Of Interest (COI), Suspicious Vessel (SV), Potential Violator Vessel (PVV), Assessed Cleared Vessel (ACV), Critical Contact Of Interest (CCOI) en Cleared Vessel (CV). De laatste twee identities zijn zogenoemde ‘positive’ identities, dat wil zeggen: ze vertegenwoordigen het hoogst haalbare niveau van informatie.
[6] H.J. Fitski, J.J.M. Dekker, E.R. van Veldhoven, ‘NLW Deployment in a Naval Scenario’, in: Proceedings of 1st European Symposium on Non-Lethal Weapons (2001).
[7] Een positive identity vertegenwoordigt het hoogst haalbare niveau van informatie. Bij gebruik van standard identities zijn de positive identities: Hostile (H), Neutral (N) en Friend (F). Bij gebruik van MIF identities zijn de positive identities: Critical Contact Of Interest (CCOI) en Cleared Vessel (CV).
[8] IAMSAR Manual, Volume II, Mission Co-ordination (Londen, IMO Publishing, 2010).
[9] J.F.J. Vermeulen, E.R. van Veldhoven, K.J. de Kraker, B. Nienhuis, ‘Simulation Based Performance Assessment for a future class of Patrol Ships’, in: MAST 2007 Conference proceedings (2007).
[10] D.J. Kuijper, S.J.J. Both, ‘Combined maritime forces. Het belang van deelname in een unieke maritieme coalitie in het Midden-Oosten’, in: Militaire Spectator 179 (2010) (12) 600-617.